
-
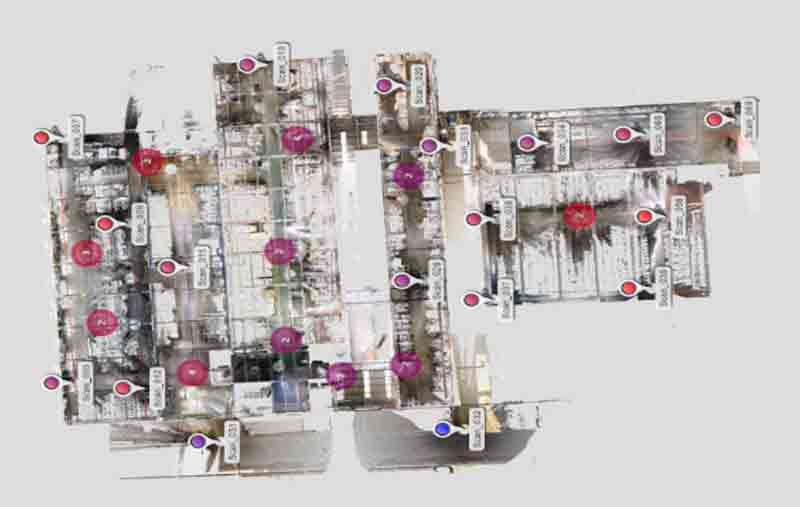
点云扫描
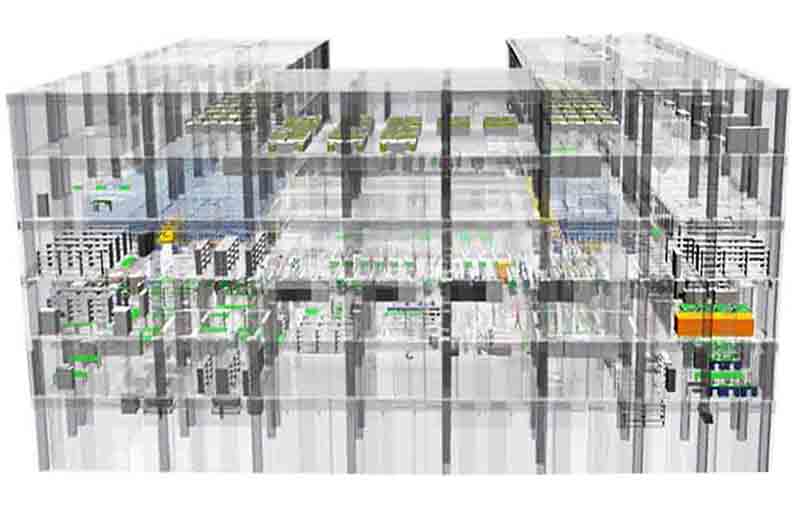
点云的获取是通过三维激光扫描仪,三维激光扫描仪通过扫描选定的目标物体或环境后,能大面积高分辨率地快速获取被测对象表面的三维坐标数据。通过点云可获得真实的三维工厂数字化模型,为设备、产线逆向建模提供数据基础,规划/改造方案设计与验证,产线集成数据检查及更新等。
-
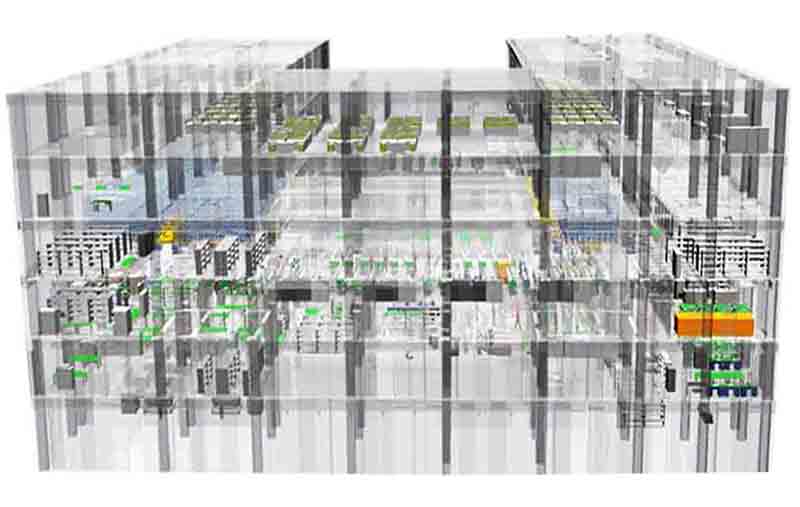
3D工厂建模
3D可视化系统通过建模软件,结合工厂建设设计方案,绘制工厂的整体效果图,事先模拟对工厂的建设和布局,通过方案的量化从而更好的进行可行性的研究分析、统筹定版项目需求,并对项目目标进行量化,3D量化规划(改造)方案供多专业沟通验证,缩短建筑设计院的实施周期,精准对接客户需求。
-
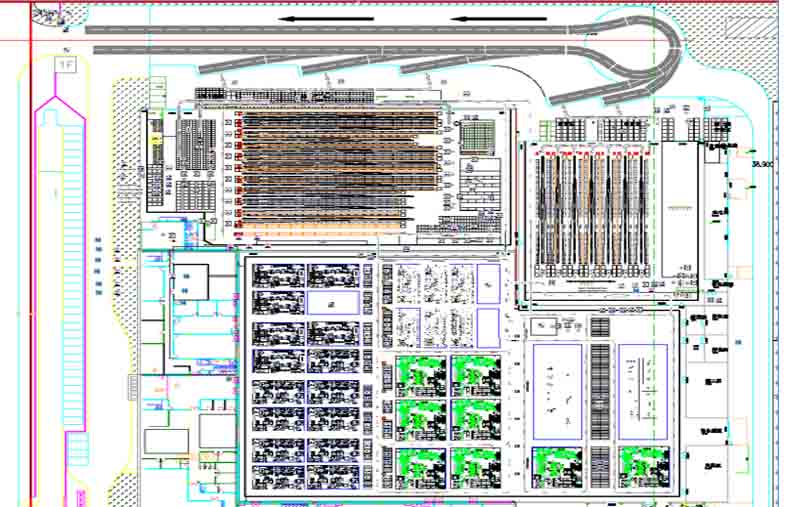
仓储布局规划.
仓库布局是在一定区域或库区内,对仓库的数量、规模、地理位置和仓库设施、道路等各要素进行的科学规划和总体设计。应在充分利用现有仓库内部空间的情况下,根据储存物资特点、公司财务状况、市场竞争环境和顾客需求情况来适时改变仓库布局。
其目标是:(1)提高仓库产出率。
(2)便于管理人员进行仓库作业管理,提高仓库内存储物资流动速度。
(3)获得最低仓库成本费用。
(4)在运输、保管、装卸物资等方面提高对顾客的服务水平。
(5)通过仓库布局早期整体规划,提高布局合理性,降低成本,减少物流浪费。
-

智能物流规划
智能工厂物流规划是传统物料搬运设计的升级迭代,结合信息化、网络化、数字化技术的普及应用,从而实现物流的智能化,主要规划原则是物流强度最低原则:综合平衡各功能区物料/半成品的需求,计算配送距离、配送频次,使工厂整体物流强度降到最低。
一般智能物流规划,指在产线布局、原料仓储、配送上线,成品仓储中设备和数字化、系统化、柔性化怎么有效的结合。通过智能物流规划提高物流存储效率、提高物流搬运效率。
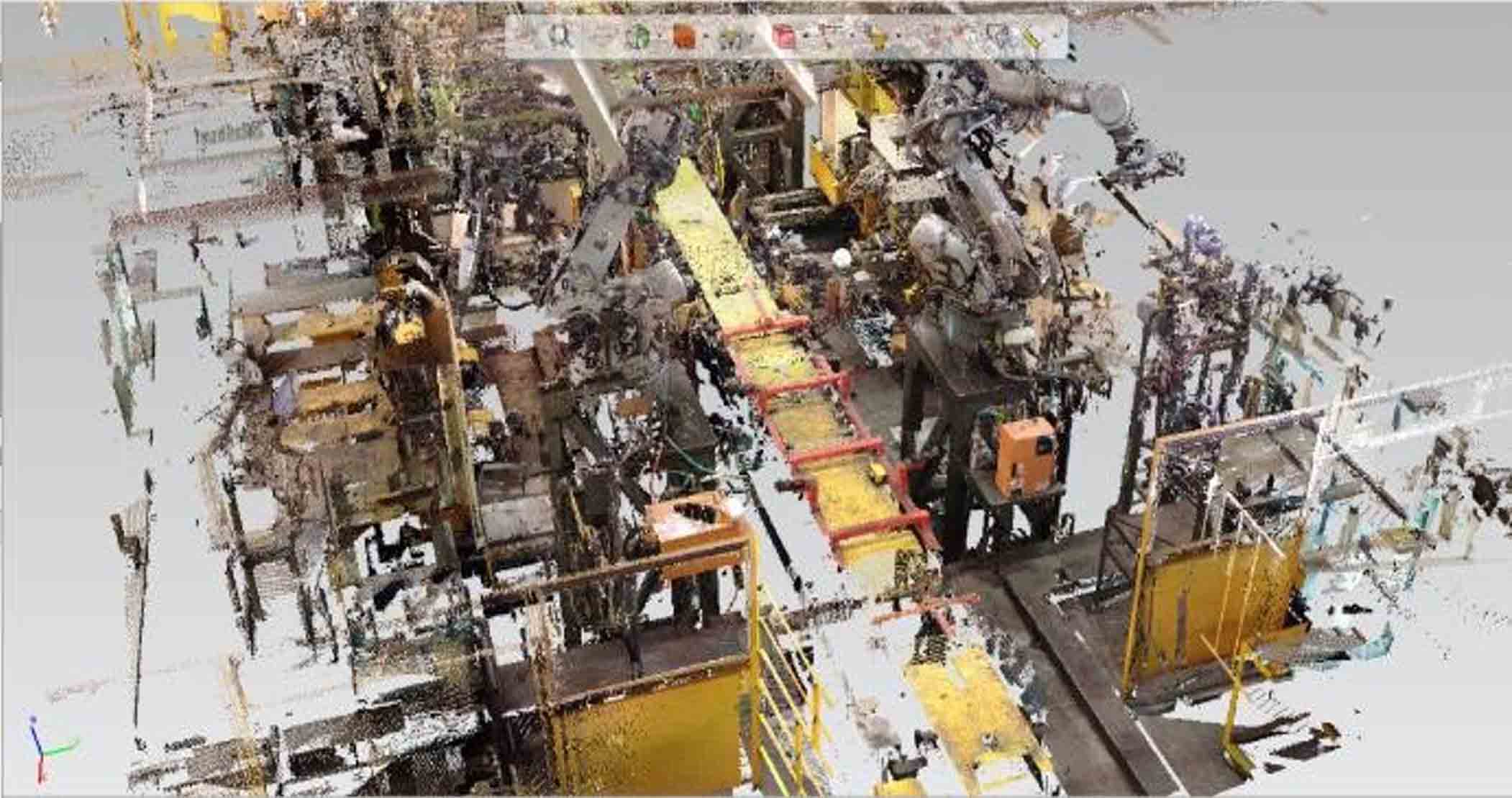
汽车厂车身主线线体改造
利用点云扫描技术获取设备位置及尺寸信息,作为新线体建设参考。某汽车厂车身主线线体改造包含 32台机器人及周边设备,校准机器人及相关设备位置及部分设备3D信息,扫描数据用于指导新线体建设设备位置及尺寸参考。
- 01
-
解决痛点:测量工作量大
- 02
-
解决痛点:测量信息不精确
- 03
-
解决痛点:测量周期长
工厂升级改造
某工厂升级改造,利用激光扫描设备及点云扫描技术对上千台设备进行扫描,获取点云信息之后,将点云信息整理导入三维建模软件,利用三维建模软件逆向建模及相对位置定位。有了原厂的厂房、线体、设备三维模型之后,即可开展新厂设计工作,新工厂规划建设完成后,老工厂整体搬迁方案参照3D工厂建模数据,可利用软件对正常搬迁方案进行模拟分析,得出最佳搬迁方案;
- 01
-
解决痛点:旧厂环境测量工作量庞大
- 02
-
解决痛点:旧厂设备信息获取不精确
- 03
-
解决痛点:旧厂搬迁方案复杂
